こんにちは。haratta(ハラッタ)です。
ブログ初の技術記事は2019年のマイクロマウス活動の振り返りをしていきます。
私が参加しているロボットコンテストは”マイクロマウス”と呼ばれる競技の中の”マイクロマウス競技”になります。(昔でいうところの”ハーフサイズ”です。)
基本的に、毎年新しいハードウェアで挑んでいるので、新機体の話も軽くしていきたいと思います。
機体の設計情報は下記の記事をご参考ください。↓

2019年の振り返り
大会に出場させた機体
こちらが2019年に活躍させた機体たちです。
旧機体: 白いハラシーマウス.ver2
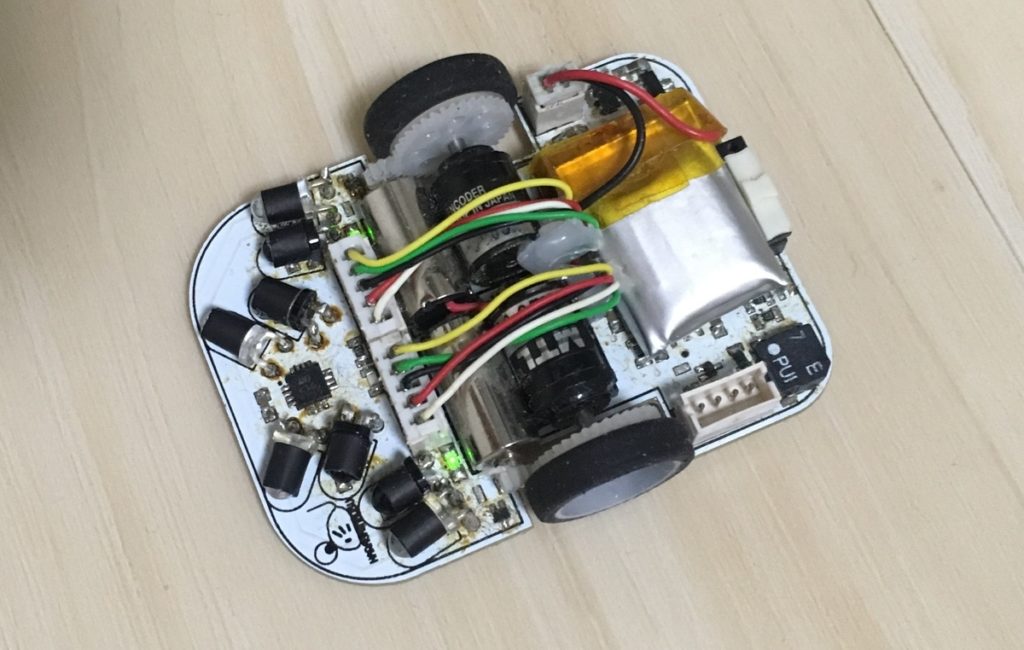
Fig. 白いハラシーマウス.ver2
新機体: 白いハラシーマウス.ver3.00
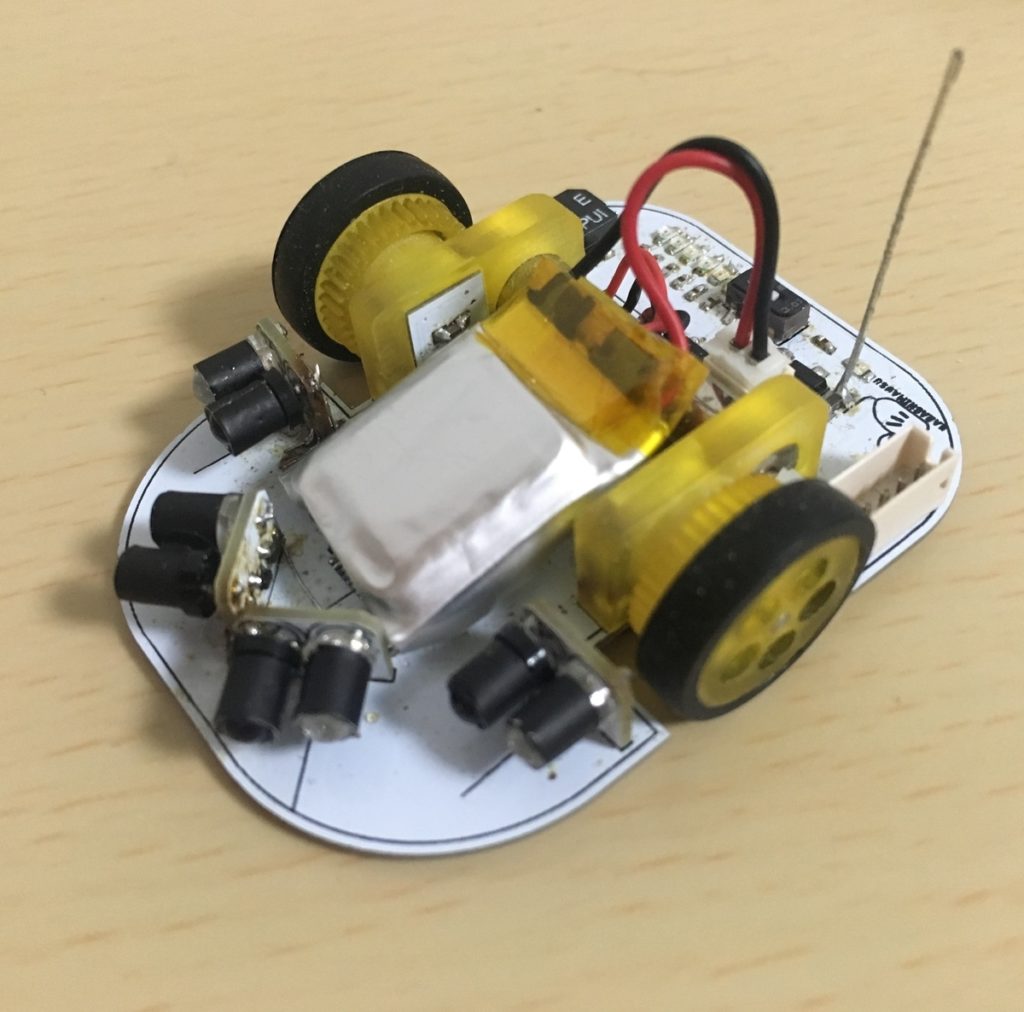
Fig. 白いハラシーマウス.ver3.00
昨シーズンは2つの理由がありまして、機体を2機大会に出場させていました。
1つ目の理由は、旧機体は 2018年度中の公式大会で完走記録がなかったため、公式大会に出走させて、完走までさせたかったという思いがありました。
2つ目は、単純に新作の機体の完成が遅れており、東日本地区大会に出場させられなかったためです。
2機体の差は、分かりやすいところでは、そもそも基板が違いまして 機体の形が違います。また、マイクロマウス作製で比較的高額になりがちなロータリーエンコーダが光学式と磁気式で異なっています。(磁気式の方が割安なので、新機体の方が安く作れています。)
簡単に比較的した機体の差分を表にしておきます。(誰得⁉︎)
| スペック | 白いハラシーマウス.ver2 | 白いハラシーマウス.ver3.00 |
|---|---|---|
| マイコン | RX631(Renesas) | STM32F4(STMicro) |
| 壁センサ | フォトダイオード(SFH229FA) | フォトトランジスタ(LTR-4206E) |
| エンコーダ | 光学式(インクリメンタル) | 磁気式(インクリメンタル) |
| 足回り | CNC切削加工 | 3Dプリンタ加工 |
大会の記録(2019)
大会別に振り返ります。今シーズンは 3大会に出場しました。
東日本地区大会 (inパシフィコ横浜)
| 東日本地区大会 | 記録 | コメント |
|---|---|---|
| 白いハラシーマウス.ver3.00 | – | 機体作製が間に合わず。 |
| 白いハラシーマウス.ver2 | 20位 | 完走したが、最短走行に失敗。 |
新機体の作製が間に合わず、旧機体のみの参加。旧機体では、初完走を決めることができました。
中部地区大会 (in名古屋専門学校)
| 中部地区大会 | 記録 | コメント |
|---|---|---|
| 白いハラシーマウス.ver3.00 | – | 機体が出来立てほやほや。ろくに走らず。 |
| 白いハラシーマウス.ver2 | 17位 | 完走したが、最短走行に失敗(2回目)。 |
新機体は、出来立てほやほやだったこともあり、大会本番前に左壁センサーが壊れていたことに気づかず出走し、ろくなデータも取れないまま撃沈。
旧機体は、中部地区大会の鬼畜迷路をなんなく探索でき、探索走行が安定していることを証明することができました。ただし、最短走行のバグがとり切れていなかったため、最短走行を決めることができませんでした。
全日本大会 (in東京工芸大学)
| 全日本大会 | 記録 | コメント |
|---|---|---|
| 白いハラシーマウス .ver3.00 | 28位 | 探索走行をクリアし、最短走行もできた。 |
大会前日と大会当日のギリギリまで調整して、なんとか探索走行が安定するようなレベルまで引き上げて大会に臨みました。最短走行のバグを修正し、公式大会で初めて最短走行まで走りきれた機体になりました。
技術的に新しく行ったこと
昨シーズンで個人的に新しく行ったことを列挙してみます。
- ギア付きホイールを3DCADで設計したこと。(ハード)
- 磁気式エンコーダを採用したこと。(ハード/ソフト)
- 壁センサをフォトトラにしたこと。(ハード/ソフト)
- ルネサス系マイコンからSTM32F4への移行。(ソフト)
- 袋小路/探索90度ターン時の前壁補正。 (ソフト)
すでにやっている方がいる技術だと思いますが、備忘録の意味も含めて個人的に躓いた部分をハードウェア編とソフトウェア編で記事を書こうと思います。
総括
昨シーズンは、東北地区大会が台風の影響で中止になったなどのハプニングに見舞われましたが、結果、中部地区大会に出場することになったり、全日本大会にて結果を残すことができて、進歩できたシーズンでした。

コメント